Evripidis Gkanias
Evripidis Gkanias
Home
Publications
Events
Experience
Awards
Projects
Contact
Resumé
Light
Dark
Automatic
computational model
Insect neuroethology of reinforcement learning
Thesis - Doctor of Philosophy. I inversigated how insects form associative memories in their mushroom bodies and how this impacts their olfactory learning, visual navigation, and time-delayed reinforcements tasks.
Neural models of ant navigation in a realistic 3D world
Your web browser doesn't have a PDF plugin. Instead you can click here to download the PDF file.
Jul 22, 2018 10:00 AM — 12:00 PM
Brisbane, Australia
Daniela Pacella
,
Evripidis Gkanias
,
Michael Mangan
,
Barbara Webb
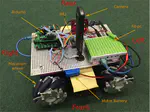
Predator Evasion by a Robocrab
Jul 27, 2017 10:00 AM — 10:20 AM
Stanford University, CA, United States
Evripidis Gkanias
,
Theodoros Stouraitis
,
Jan M. Hemmi
,
Barbara Webb
Predator Evasion by a Robocrab
Theodoros Stouraitis
,
Evripidis Gkanias
,
Barbara Webb
Exploiting invisible cues for robot navigation in complex natural environments
Design a sensor that transforms skylight into a compass direction.
Miniature insect model for active learning (minimal)
We develop a new foundation for understanding natural learning by developing a complete multilevel model of learning in larvae
Robocrab: data-driven adaptation of the evation behaviour in fiddler crabs
Disertation - Master of Science. We create a semi-supervised structure of neural network, inspired by the physiology of neurons in fiddler crabs, and train it to adapt the evasion behaviour of fiddler crabs on potential predators, solving a complicated visuomotor problem (developed in Python using the Theano/Tensorflow-based ‘keras’ library
«
Cite
×