Evripidis Gkanias
Evripidis Gkanias
Home
Publications
Events
Experience
Awards
Projects
Contact
Resumé
Light
Dark
Automatic
fiddler crab
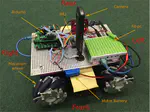
Predator Evasion by a Robocrab
Jul 27, 2017 10:00 AM — 10:20 AM
Stanford University, CA, United States
Evripidis Gkanias
,
Theodoros Stouraitis
,
Jan M. Hemmi
,
Barbara Webb
Predator Evasion by a Robocrab
Theodoros Stouraitis
,
Evripidis Gkanias
,
Barbara Webb
Robocrab: data-driven adaptation of the evation behaviour in fiddler crabs
Disertation - Master of Science. We create a semi-supervised structure of neural network, inspired by the physiology of neurons in fiddler crabs, and train it to adapt the evasion behaviour of fiddler crabs on potential predators, solving a complicated visuomotor problem (developed in Python using the Theano/Tensorflow-based ‘keras’ library
Cite
×